- 基本概念
- 同步發電機分析
- 勵磁系統
- 同步發電機運轉型態
- 發電機研習課程
本章節所討論之調速系統僅適用於引擎發電機,該系統由電子調速器、電磁拾取器及作動器所組成,提供引擎在無載至滿載之轉速調整。本文中引用之專有名詞為國內業界常用名詞,可能與其他用詞不同。例:作動器=執行器=致動器=ACT、電子調速器=電調、電磁拾取器=拾波器=磁阻發送器=MPU、燃油閥=燃油調節器、下垂調整=調差......等,閱讀時請自行對照。
速度調整系統是一個閉迴路系統。什麼是閉迴路系統呢?舉例而言,當我們將冷氣機溫度設定在25 °C時,如室內溫度上升到26°C則冷氣機便會啟動壓縮機開始製造冷空氣,使溫度下降。當室內溫度下降至24°C時便停止壓縮機運轉,如此便能將室內溫度控制在25 °C。壓縮機怎麼知道何時開何時關?
控制器讀取感溫器量測到的溫度與溫度控制器所設定溫度,通過電子電路將兩者信號不斷的做比較,其比較結果最終來決定壓縮運轉與否。這種不斷讀取 ➔ 比較 ➔ 輸出 ➔ 讀取 ➔ 比較......的控制系統稱為閉迴路系統。
調速器的動作原理與上例類同,差異在於壓縮機只有on-off而調速器輸出到作動器的電流必須經PID(後詳述)精細調制,以取得平穩速度。
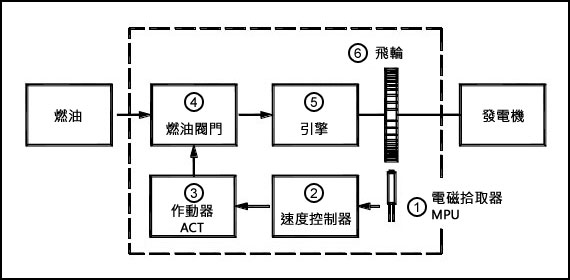
應注意的是閉環系統在所有時刻都是連續的1 ➔ 2 ➔ 3 ➔ 4 ➔ 5 ➔ 6 ➔ 1 ➔ 2......,其中任何一點出現故障,整個系統都無法運作。既系統中每個元件都是同等重要的。如果供油管故障,系統即故障。如果電磁拾取器出現問題,系統也無法運作。如果作動器與燃油閥門之間連桿間隙過大,系統同樣無法按預期工作。
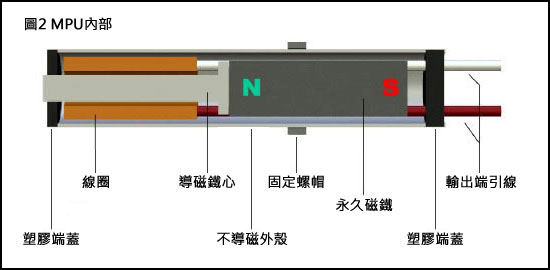
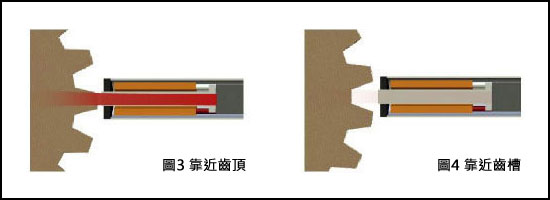
MPU是由一塊永久磁鐵外面纏繞線圈而組成的(參閱MPU結構)。也可以說MPU就是一個微型發電機。它具有任何發電機所具有的磁場。其安裝位於飛輪齒上方,當飛輪的齒頂靠近MPU時內部磁場最大,當齒槽靠近MPU時內部磁場最小,如此飛輪轉動時MPU內部磁場便不斷的變化,纏繞在外面導體繞組因而產生交流感應電壓 。其交流電壓 、頻率隨飛輪轉速改變,轉速越高MPU感應的交流電壓 、頻率就愈高。MPU 的信號通常由很多因素決定,如與飛輪齒之間的縫隙,齒數,飛輪速度及MPU感應能力等。一般的調速器需RMS值不小於2V的電壓保證其正確的控制操作、內阻常為10-300Ω。
MPU感測器頻率計算公式 : F=齒數x發動機轉速(RPM)/60。該頻率與發動機速度成正比。
其主要工作是將MPU所取得的感應頻率轉換為一直流電壓信號,再與所設定的電壓(頻率)做比較,其結果經PID電路運算,最後輸出到作動器。
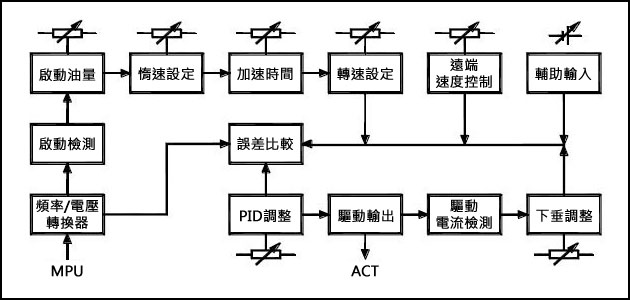
為滿足多方需求,調速器除基本穩定速度功能外,並擴展到同步並機及其他功能,例如下垂補償、惰速、遠端遙控輸入、黑煙抑制啟動等,如此更擴大了調速器的應用領域。
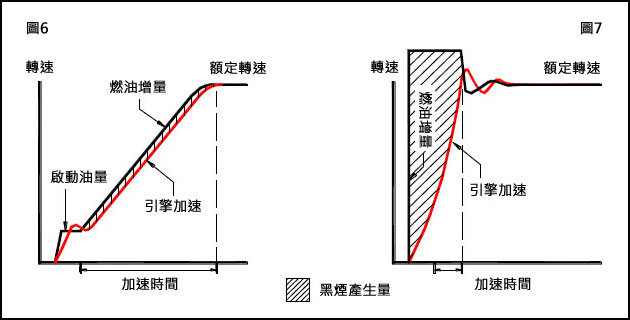
由於機械慣性原理,使得引擎從零加速至額定轉速時必須一段時間,具有黑煙抑制功能的速度控制器,可以依據引擎慣性加速度來設定油量遞增曲線(圖6),如此既可避免啟動時速度爬升期間注入過量燃油而產生大量黑煙(圖7)。
操作機制:意指將引擎轉速度降低至較低轉速,其功能為:一、為引擎暖機或冷卻。二、節能運轉,例如使用電動馬達懸吊作業,在作業空隙可以將引擎調至惰速改以變頻器供應其基本通訊、控制及空調電源。
操作機制:既使兩部完全相同的發電機做同步時,也會因為饋電線不等長而引起負載不平衡,其包含了實功與虛功,其中實功與引擎轉速有關。同步時調速器提供了兩種模式來平衡各發電機間的轉速:1、等速模式 2、下垂模式。
等速模式中同步時是零衰減,也就是說調速器在帶負載時也一直保持其無負載速度,達到此狀態必須有一個中央監控裝置(負載分配器)不斷檢測各發電機輸出的實功,當實功不平衡時對各發電機調速器輸出不同的直流電壓信號(0-5Vdc)使其實功率回復平衡。當然前提是發電機有足夠電能維持這一速度。
操作機制:由監控器接一類比電壓信號線接於調速器的輔助輸入端子。
下垂模式中同步速度將衰減,帶負載時發電機速度會降低。每個下垂量調速器都有一個與之相關的下垂百分比。圖9所示為調速器的下垂百分比為5%。無負載時速度設定為1890rpm,帶負載時速度開始連續下降直到滿負載的1800rpm,則百分比可計算(1890-1800)/1890=5%。此種模式僅能讓各發電機間實功率粗略的平衡。
操作機制:調整下垂調整比例。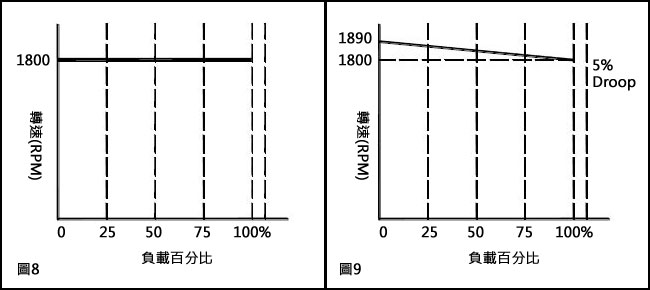
引擎由啟動馬達帶動時,MPU必須發給一個高於2V的電壓信號傳給調速器,告訴的調速器現在引擎正在啟動中,調速器才允許作動器動作供油,這是調速器內部啟動檢測電路動作的原因,也因此只要我們將引擎停止調速器就自動關閉(off)作動器電源。
操作機制:自動。在調速器本體設有一個可以設定期望轉速的轉速設定,也可能設有MPU頻率範圍選擇,使單一調速器可適用於不同高低轉速的引擎上。除此,調速器也提供了可以由本體以外的外接電位器來控制期望轉速。
操作機制:轉速設定,頻率範圍選擇,外接電位器。為了完全理解PID(比例、積分、微分)控制,首先對增益有一個基本的認識,什麼是增益呢?增益在電子學上,通常為一個系統的訊號輸出與訊號輸入的比率。如5倍的增益,即是指系統令電壓或功率增加了5倍。增益也可以是小數,如0.5倍的增益,即是指系統令電壓或功率衰減了1/2。增益(GAIN)通常以G表示,以機械槓桿增益為例子如下:
每個輸入量相同,都是1",但因其支點所處位置的不同導致輸出的不同。
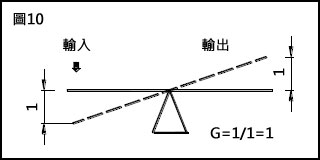
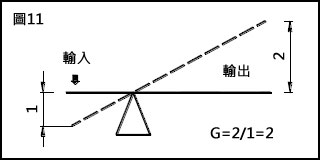
圖11:支點處於離輸入端近的位置,輸入量為1",輸出量為2",所以,增益G2=2/1=2。
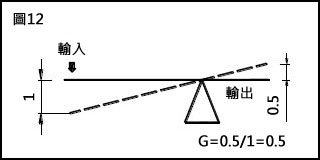
圖12:支點處於離輸出端近的位置,輸入量為1",輸出量為0.5,所以,增益G3=0.5/1=0.5
當調速器調整比例增益變化的時候,上例子可用於調整發電機速度到期望值。發電機空載時,順時針緩慢調速增益電位元元計,直到引擎擺振,擺振之後,再緩慢逆時針調整電位計,直到發電機達到穩定狀態(既擺振與穩定的臨界點)。電位器的這個位置是調速器反應與發電機反應的相匹配點。
PID控制就是比例,積分,微分聯合控制。在此將介紹調速控制器中每種增益的作用,然後確定正確的調整增益參數及其順序。
比例增益,積分增益,微分增益的數學演算法都是基於電子迴路的函數。比例增益簡單的說就是計算一個期望速度與實際速度的誤差的比率。例如目前轉速為1700RPM而期望值為1800RPM比較結果為-100RPM,這個值乘以我們設定的比例增益值後,既決定了輸出到ACT的電流增量。當比例增益調的過大時ACT開啟燃油閥角度變大速度上升的量可能高於期望值,下一次調速器再運算時又會減得太低,因此產生了擺振。為了確定比例增益的正確位置,調整時必須緩慢的來回找出穩定的臨界點。
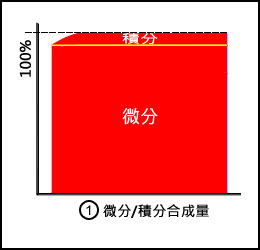
例一、如果發電機轉速由人來操作,當突加負載時引擎速度下降,操作者必須使燃油閥門變大來恢復轉速。如果閥門一次就轉到最大,轉速可能超過,所以操作者可能先快速轉動一些然後再慢慢調到目標轉速,而且越靠近目標值時就調得越慢。為甚麼剛開始會快速轉動閥門,後來變得越來越慢呢?因為操作者根據目前轉速與目標值不斷比較、判斷的結果。這樣的加速方式是一種微積分曲線,前段快速轉動稱為微分,後段越來愈慢稱為積分,由人來執行這條曲線可能需要5-10秒,由電子電路來控制可以小於1秒。
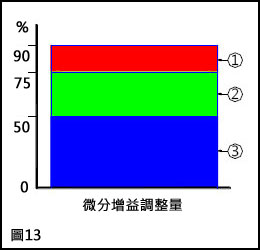
微分調整的主要目的是提高調速器的反應速度。如上例中的「剛開始快速轉動」如果在剛開始就慢慢調,則要調到期望值可能要很長的時間。那麼「剛開始快速轉動」是轉動多少才能在最快時間到達期望值,這個在產生速度變化後,剛開始要快速轉動的量稱為微分增益。如果一部發電機在1000rpm時為2個單位油量,在1800rpm需要5個單位油量,若微分增益調整為3則引擎從1000上升到1800rpm的時間將會最短。若微分增益調整為2則引擎上升到1800rpm的時間將會拉長。若微分增益調整為4 則引擎會產生過速。太多可能過速,太少可能拉長恢復時間,這與引擎加速度及慣性不同而調整的量也不同。
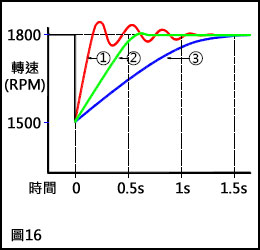
調整微分增益的過程與調整比例增益過程類似。當發電機以額定速度運轉時,慢慢增加微分增益直到發電機開始擺振,一旦擺振,減少增益直到轉速穩定(臨界點)。我們知道在比例增益的情況下發電機的擺振頻率為3-7Hz,但在微分增益是時,它擺振頻率大於7Hz,如此可以判別發電機擺振頻率是哪一種增益形式。
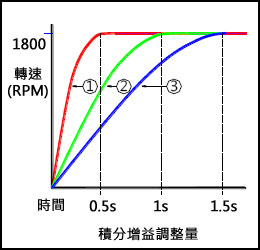
積分調整主要目的是提高引擎轉速穩定度及精確度(如不精確同步就會產生問題)。如上例中「越靠近目標值時就調得越慢」,如果在接近目標值也快速的調整油閥門則可能產生過速。在接近目標轉速時調整加速度的增量稱為積分增益(主要調整引擎及調速器的加速時間相匹配)。如果一部發電機從1000rpm加速到1800rpm需要1秒,若積分增益也調1秒則調速器會以最小過速在1秒之內加速到1800rpm。如果若積分增益調2秒則調速器會以2秒的加速時間將引擎加速到1800rpm。如果若積分增益調0.5秒則調速器會在0.5秒時測量引擎轉速,但引擎加速度沒那麼快速故調速器再繼續增大油閥,等引擎加速到1800rpm時油閥可能以最大,因此產生過速。調整積分器的最終目的就是使發電機加速度與積分器加速度相匹配(每個發電機都有它自己的加速度)。
調整積分增益時,將電位計放於任一位置,它在起動發電機時監控發電機速度。如果發電機超過設定速度,重複調整電位計直到所需參數出現。將積分增益與比例增益聯合使用,就可以構成一個同步調速器,那就可以得到一個速度零衰減調速器。
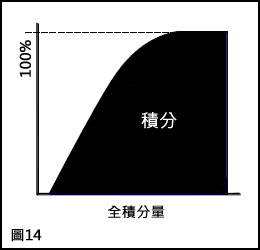
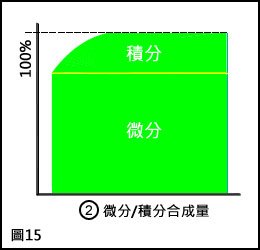
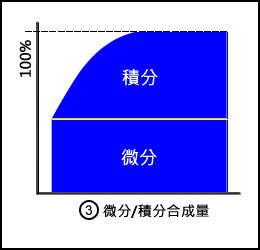
為充分了解微分、積分增益在調速器上的運用,以下將用圖表舉例說明:
作動器結構請參閱ACTUATOR作動器。在討論連桿裝設之前,先要了解發電機增益,電子增益,機械增益之間的關係。什麼是發電機增益呢?讓我們再回憶一下增益的定義:增益就是輸出與訊號輸入的比率。在此,輸入為燃油,輸出為發電機速度。將一定數量的燃油在發電機空載時供給引擎,引擎速度將增加,假設它的速度為500rpm。如果,相同數量的燃油供給帶50%負載的發電機,它的速度會增加到500rpm嗎?當然不會。當發電機滿載時,相同數量的燃油產生的速度更低。這證明了發動機負載會降低其增益。也得知發電機在空載時增益最大。
是一個固定參數值,當調整PID後增益就被固定,與發電機負載大小無關。
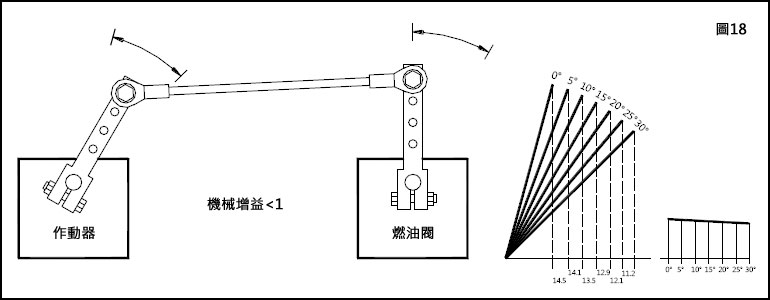
大多數作動器是以旋轉方式經連桿傳動燃油閥,其移動量為正玄與餘玄函數,因安裝角度不同其移動量可分為兩種:(一)線性傳動 (二)非線性傳動。
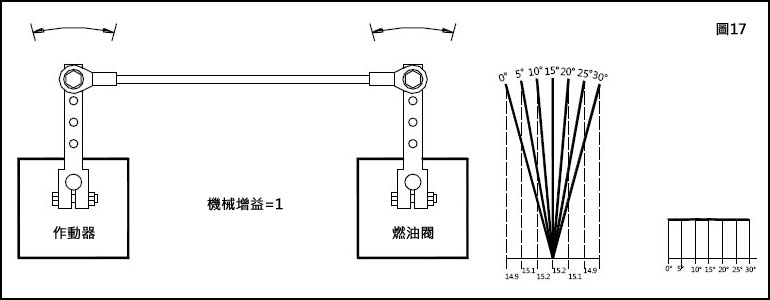
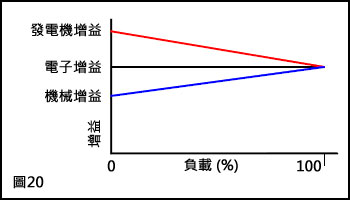
發電機增益,電子增益,機械增益這三種增益結合起來會對調速系統有一個什麼樣的影響呢?這三個增益的總量等於調速器系統總增益,在最佳工作狀態下其增益為100%。當增益超過101%時,系統開始擺振,小於99%時調速系統反應減緩。最佳反應狀態是在發電機0-100%負載範圍內維持增益為100%。發電機帶負載時,機械增益是一定數,電子增益也是定數,但發電機增益降低,總增益降低則導致性能降低。
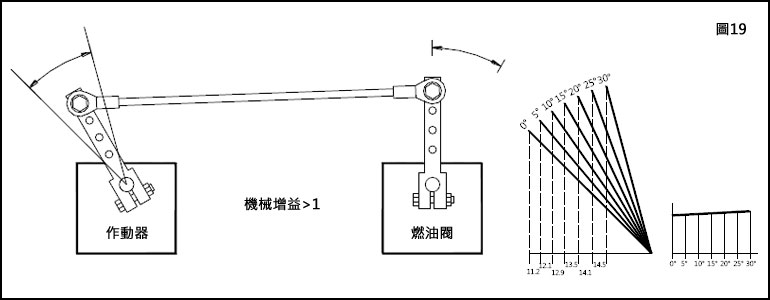
使用非線性聯動裝置究竟對發動機性能有何影響呢?當發電機加負載時電子增益保持定數,發電機增益降低,所以機械增益必須增加,其結果機械增益增加的部分剛好抵消發電機增益降低的部分。這樣在整個負載範圍內總增益才能保證為定值100%,系統則一直處於最佳狀態。
既負載發電機增益、電子增益、機械增益總和增益為100(%)
但在實際應用中,非線性傳動裝置並不能做到完全抵消發電機增益的下降那部分。當發電機帶負載時它的總增益不可能一直保持在100%。但相較之下,非線性傳動比線性要好一些,筆者還是建議使用非線性連動裝置(圖19)。